۱. مشخصات فنیموتور eVTOL
In برق توزیع شدهدر نیروی محرکه، موتورها چندین پروانه یا فن را روی بالها یا بدنه به حرکت در میآورند تا یک سیستم نیروی محرکه تشکیل دهند که نیروی رانش را برای هواپیما فراهم میکند. چگالی توان موتور مستقیماً بر ظرفیت بار هواپیما تأثیر میگذارد. ظرفیت توان خروجی، قابلیت اطمینان و سازگاری محیطی موتور از عوامل مهم در تعیین ویژگیهای دینامیکی و ایمنی هواپیمای با نیروی محرکه الکتریکی هستند. انتخاب وسایل نقلیه الکتریکی، پهپادها و موتورهای eVTOL به دلیل هزینههای مختلف، سناریوهای کاربردی و دلایل دیگر متفاوت است [1].

(منبع عکس: وبسایت رسمی نتورک/سفران)
1) وسایل نقلیه الکتریکی: آهنربای دائمی بیشترموتورهای سنکرون،موتورهای آهنربای دائم با راندمان و گشتاور بالاتر میتوانند تجربه رانندگی بهتری را فراهم کنند. در عین حال، چگالی توان بالای موتورهای آهنربای دائم میتواند به خودروهای الکتریکی کمک کند تا با حجم یکسان، توان بالاتری را به دست آورند.
(2) پهپاد: معمولاً بدون جاروبک استفاده میشودموتور دی سی.موتور DC بدون جاروبک وزن و سر و صدای کمی دارد و هزینه نگهداری آن پایین است که برای نیازهای پرواز پهپادها مناسب است؛ دوم، سرعت موتور DC بدون جاروبک بیشتر است که برای نیازهای پرواز پرسرعت پهپادها مناسب است. به عنوان مثال، DJI از موتورهای بدون جاروبک استفاده میکند.
(3) eVTOL: با توجه به الزامات بالاتر برای راندمان موتور و چگالی گشتاور، موتور سنکرون آهنربای دائم یک راه حل بسیار امیدوارکننده برای سیستم نیروی محرکه الکتریکی است، زیرا موتور آهنربای دائم شار محوری نرخ استفاده بالایی از فضای شعاعی دارد و چگالی توان و چگالی گشتاور در مورد نسبت قطر طول کوچک مزایایی دارند. هواپیماهای VTOL الکتریکی فعلی، مانند Joby S4 و Archer Midnight، همگی از موتورهای سنکرون آهنربای دائم استفاده میکنند [1].
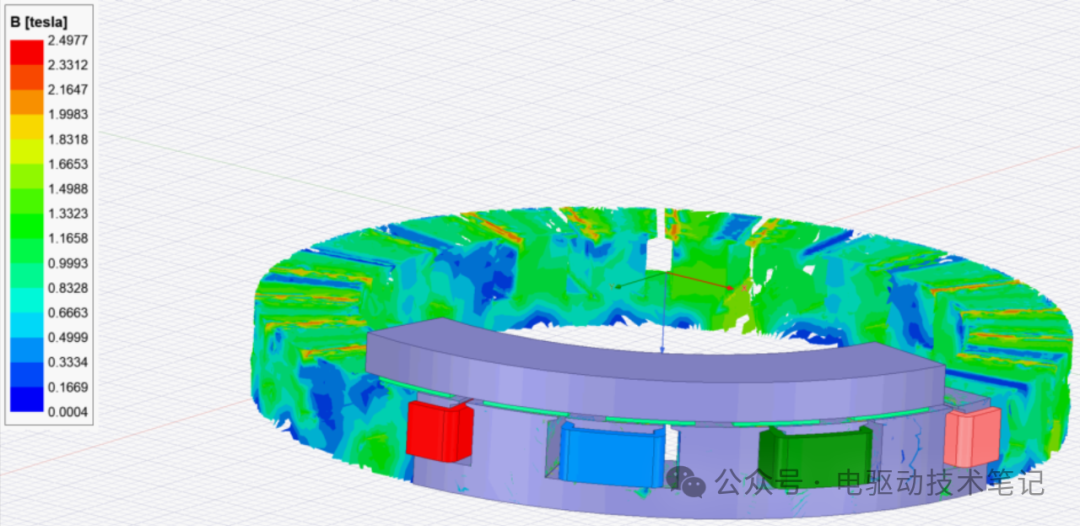
شکل زیر تصویر ابری شدت القای مغناطیسی روتور ثابت موتور شار محوری تک روتور تک استاتور را نشان میدهد.
شکل زیر مقایسهای از پارامترهای موتور هواپیمای برقی و وسیله نقلیه برقی است.

روند توسعه موتور eVTOL 2.eVTOL
در حال حاضر، روند اصلی توسعه سیستم قدرت eVTOL، کاهش وزن ساختار موتور و وزن کمکی سیستم خنککننده با بهبود فناوری طراحی الکترومغناطیسی، فناوری مدیریت حرارتی و فناوری سبک وزن و بهبود مداوم چگالی توان موتور و ظرفیت خروجی توان در طیف وسیعی از شرایط متغیر است. طبق «تحقیق و توسعه خودروهای پرنده و فناوریهای کلیدی»، موتور پیشران هوانوردی توانسته است با استفاده از مواد عایق با محدودیتهای دمایی بالاتر، مواد آهنربای دائمی با چگالی انرژی مغناطیسی بالاتر و مواد ساختاری سبکتر، چگالی توان نامی بدنه موتور را به بیش از 5 کیلووات بر کیلوگرم برساند. با بهبود طراحی ساختار الکترومغناطیسی موتور، مانند استفاده از آرایه مغناطیسی هالباخ، ساختار بدون هسته آهن، سیمپیچ لیتز و سایر فناوریها، و همچنین بهبود طراحی اتلاف حرارت موتور، انتظار میرود چگالی توان نامی بدنه موتور در سال 2030 به 10 کیلووات بر کیلوگرم برسد و چگالی توان نامی در سال 2035 از 13 کیلووات بر کیلوگرم فراتر رود [1].

۳. مقایسه مسیرهای الکتریکی خالص و هیبریدی
در مقایسه با مسیر الکتریکی خالص و مسیر هیبریدی، از انتخاب فعلی تولیدکنندگان مربوطه، پروژه eVTOL داخلی عمدتاً مبتنی بر طرح الکتریکی خالص است که با چگالی انرژی باتریهای لیتیوم-یون محدود شده است و eVTOL با ظرفیت کم مسافر، بهترین صحنه فرود فناوری پیشرانش الکتریکی خالص است. در خارج از کشور، برخی از تولیدکنندگان طرح هیبریدی را از قبل تدوین کردهاند و در چندین دور آزمایش و تکرار، پیشتاز بودهاند. همانطور که از جدول زیر مشاهده میشود، طرح هیبریدی آشکارا در زاویه استقامت قویتر است و میتواند در سناریوی ترافیک مسافت متوسط-طولانی و ارتفاع کم در آینده کاربردهای بیشتری داشته باشد [1].
زمان ارسال: ۲۷ فوریه ۲۰۲۵